Purpose:
Widely used in motor speed detection, pulse counting, position limit and so on.
Module Features:
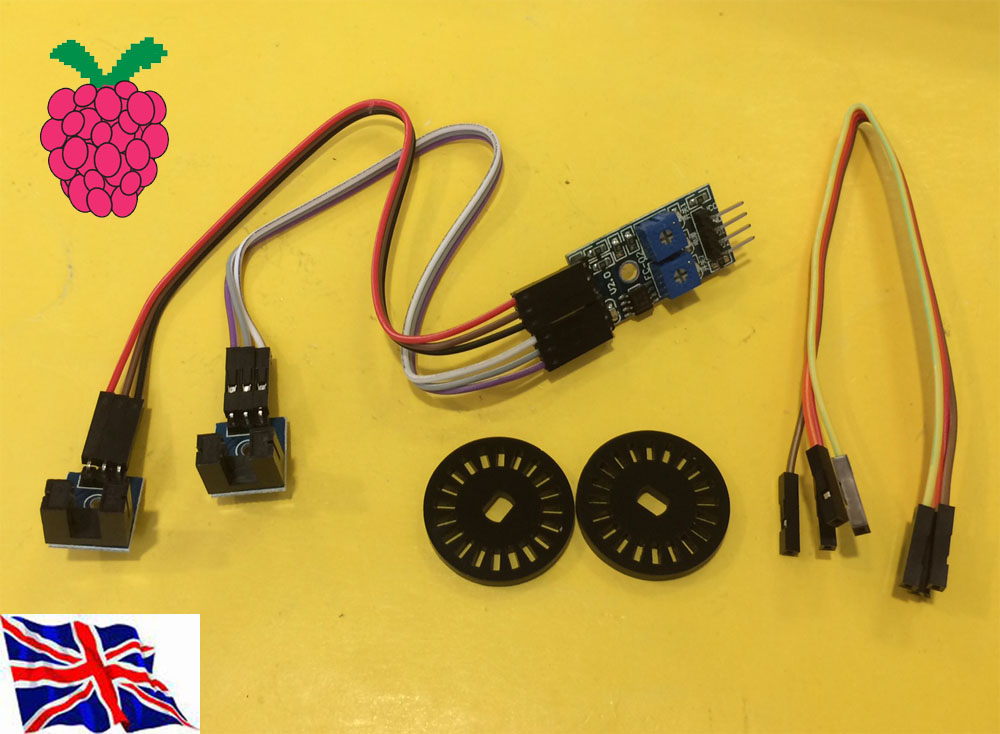
1. the use of imported groove coupler sensor
2. the slot width 5mm.
3. the output state indicator lamp output high, output low lights.
4. with cover, high output; unobstructed, output low.
5. the comparator output signal clean waveform is good, driving ability, than 15mA.
6. Operating Voltage 3.3V-5V
7. the output format: Digital switching output (0 and 1)
8. a fixed bolt holes for easy installation
9. small plates PCB size: 3.2cm x 1.4cm
10. using a wide voltage LM393 comparator
Module for use:
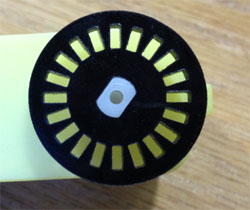
(1) module slot unobstructed, the receiver tube is turned on,
the module DO output low, cover when, DO output high.
(2) DO module can be connected to the relay, consisting limit switches and other functions,
can also be connected with the active buzzer module, composed of alarm.